Verschiebe nun die Buzzer-Melodie von Setup auf Loop.
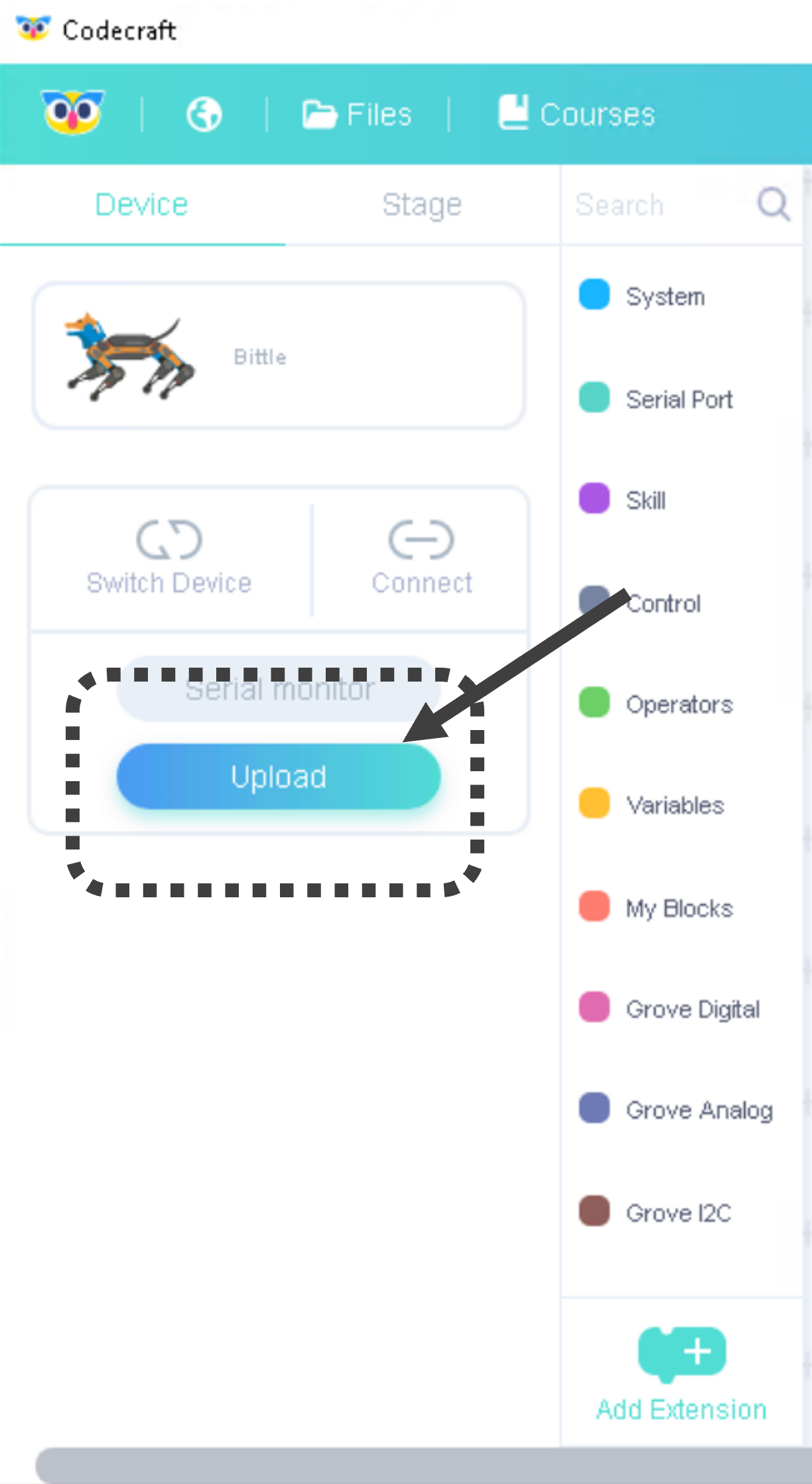
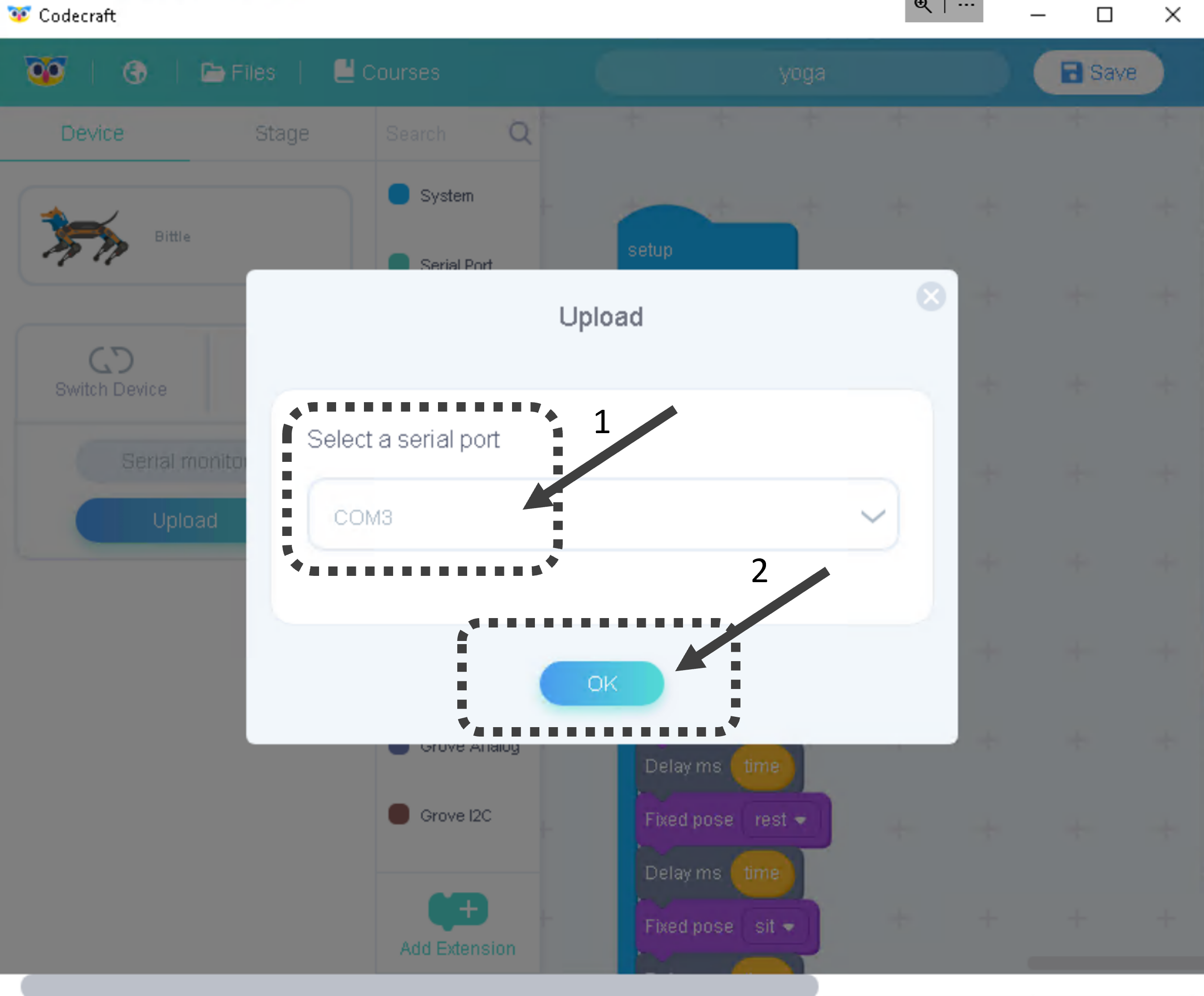
Klicke auf hochladen (Upload) und warte, bis der Upload abgeschlossen ist.
Was beobachtest du? Was verändert sich wenn man den Melodie-Block von Setup in Loop verschiebt?
Note
Erklärung:
Wenn ein Block im Setup ist, dann läuft er nur einmal zu Beginn eines Programms ab. Wenn ein Block in einer Schleife (Loop) ist, dann wird er immer und immer wieder ausgeführt (bis der Akku leer ist).
Entferne die Buzzer-Melodie, wenn du sie nicht mehr hören möchtest.
Füge den Walk-Block aus dem Skill-Katalog innerhalb der Schleife (Loop) hinzu.
Füge den Bewegungsblock (Execute the movement) nach dieser Schleife (Loop) aus. Dieser Block ist wichtig, da mit nur mit ihm eine Bewegung ausgeführt wird.
Klicke auf hochladen (Upload) und warte, bis der Upload abgeschlossen ist.
Warning
Bittle sollte jetzt anfangen zu laufen. Seie vorsichtig, da er immer noch mit dem PC verbunden ist. Entferne den USB-Anschluss, um mit ihm spazieren zu gehen.
Note
Erklärung:
In der obigen Aufgabe hast du den Befehl Walk (Gehen) und dann die Bewegung ausführen (Execute the movement) verwendet.
Der Befehl Walk wird nur zur Vorbereitung für die Aktion gebraucht. Ausgelöst wird die Bewegung mit dem Bewegung-ausführen-Block (Execute the movement).
5.3. Aufgabe 3 - Steuere den Hund mit der Fernbedienung. 👩🏭
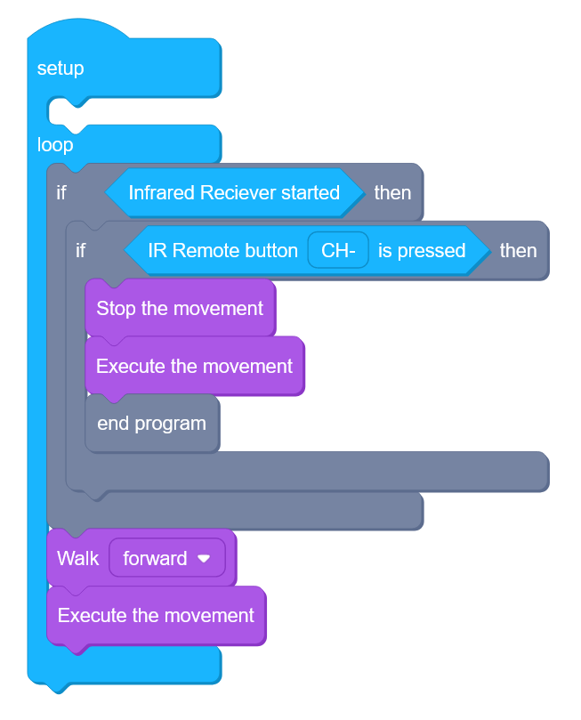
Füge die Blöcke wie im Bild ein und verbinde sie passend.
Klicke auf hochladen (Upload) und warte, bis der Upload abgeschlossen ist.
Zunächst beginnt Bittle zu laufen. Drücke nun die obere linke Taste auf der Fernbedienung.
Was siehst du? Hält der Roboter an?
Note
Erklärung:
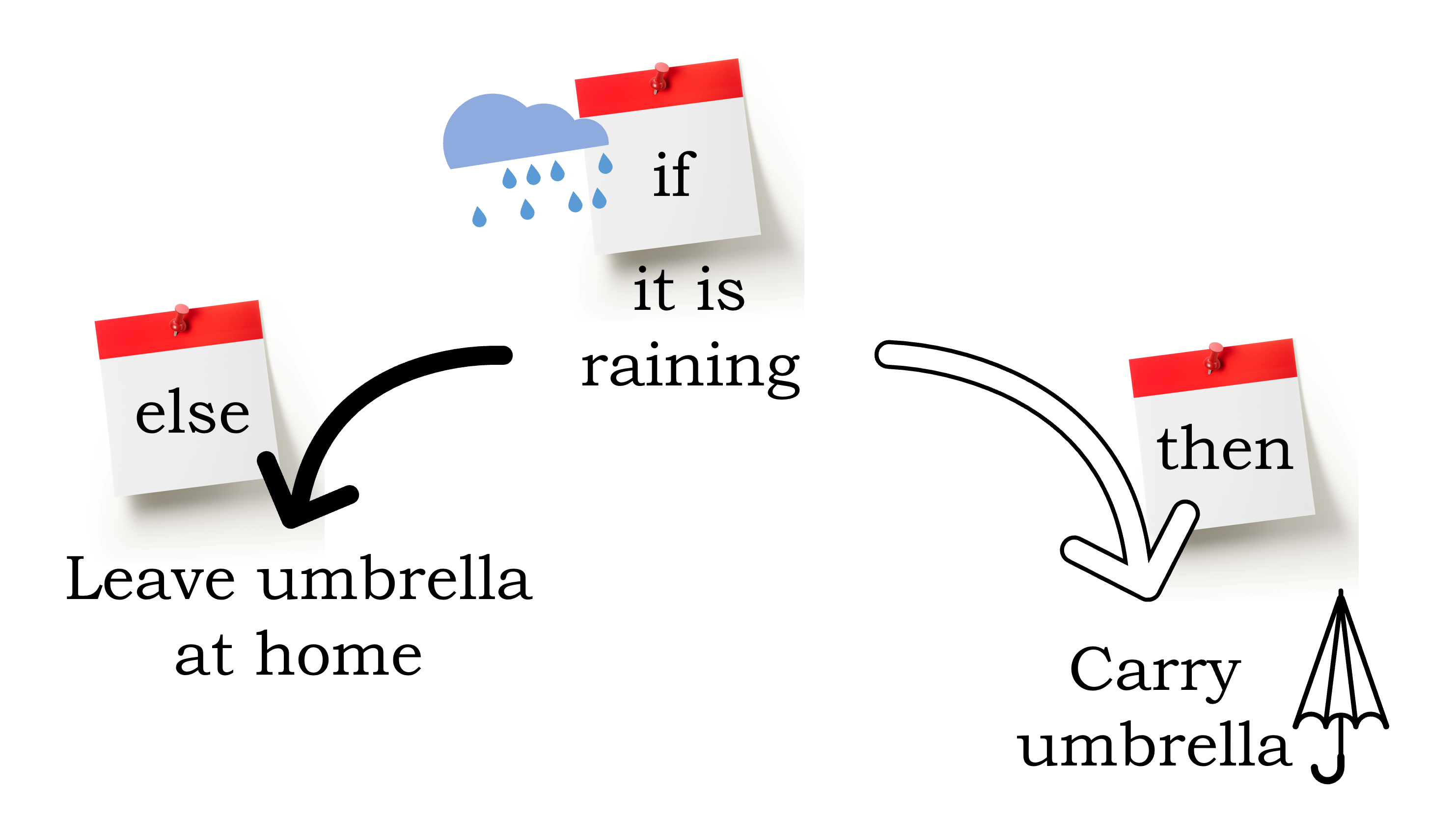
In dieser Aufgabe hast du einen if-Block verwendet. Der If-Block ist eine Anweisung mit einer Bedingung, die vorher abgefragt wird. Wenn eine bestimmte Bedingung erfüllt ist, wird dieser Teil des Codes ausgeführt. Der Code wird übersprungen, wenn die Bedingung nicht erfüllt ist. Der If-Block ähnelt den Überlegungen aus deinem täglichen Leben. Zum Beispiel:
Hier hast du den if-Block verwendet, um die Verbindung zwischen Roboter und Fernbedienung zu überprüfen. Wenn Bittle das Signal empfängt, dann ist die Bedingung des ersten If-Blocks korrekt und die Bedingung des zweiten If-Blocks wird überprüft. Jetzt wird geprüft, welche Taste gedrückt wurde. Wenn du die von dir programmierte Taste gedrückt hast, dann ist auch die zweite Bedingung korrekt und die Anweisung des zweiten If-Blocks wird ausgeführt. Wenn du eine andere zufällige Taste gedrückt hast, dann wird der if-Block übersprungen und der Rest des Codes läuft weiter.
Wow, du bist schon fertig und hast das Ende der heutigen Reise erreicht.